3. Experimental Results of Photo Morphing
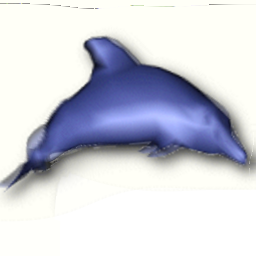
We present some experimental results of both photo morphing algorithms in the section.
Besides the strength and weakness discussed in Section 1.2 and 2.2, I also found that: The time of the first algorithm is generally 5s, and the time of the second algorithm is 12s, for a 256x256 image on a 3.0GHz, 1G computer. It is seen that the second algorithm has higher computational cost and weaker in performance. In addition, the second algorithm will perform better when there are more control points.
Appendix User Interface
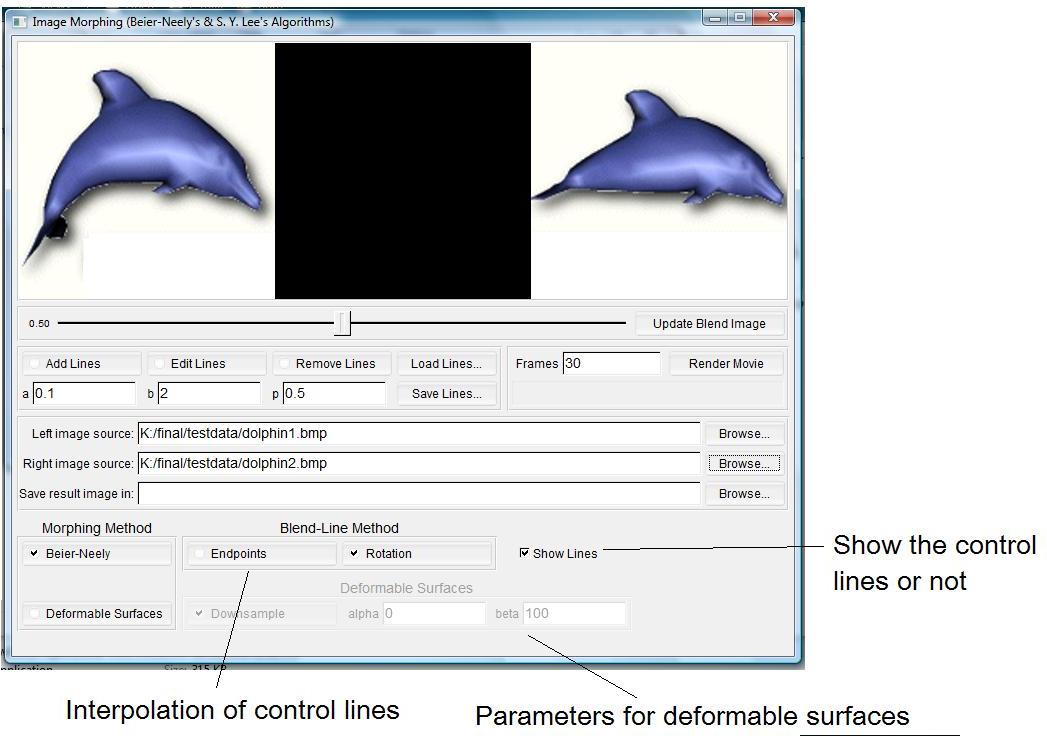
I do not change the current layout so as to keep the consistency. The new functions are added at the bottom (Fig. 11).
The improvements of the user interface are:
(1) Use different colors to show different control lines, so that it is easy to distinguish them. Use a color square as the start point and a black square as the end point of a line segment, so that the user will not make mistakes with the line's direction.
(2) Add a checkbox "Show Lines", so that the user may remove the lines from the display to see the details of the image.
Fig. 11 The user interface
Acknowledgement
I would like to thank Mr. Cao, Zhimin for showing me the excellent package of solving sparse linear systems (link) and valuable discussion.
References
[1] Thaddeus Beier, Shawn Neely. Feature-Based Image Metamorphosis, SIGGRAPH 1992. [Link]
[2] S.Y. Lee, K.Y. Chwa, J. Hahn and S.Y. Shin. Image Morphing Using Deformable Surfaces, Proc. Computer Animation, 1994. [pdf]
[3] George Wolberg, Image morphing: a survey, The Visual Computer, 1998, pp360-372.